吕鸿昊
lvhonghao[at]zju[dot]edu[dot]cn
Intro
PhD in Mechatronic Engineering at Zhejiang University, Hangzhou, China, advised by Prof. Geng Yang.
I was also a visiting Ph.D. student with Division of Information Science and Engineering
at KTH Royal Institute
of Technology, Stockholm, Sweden, advised by Dr. Zhibo
Pang. I worked as a guest researcher for one year in the Lab of Intelligent Communication & Robotics
with Prof. Alf Isaksson at ABB Corporate Research Center, Vasteras, Sweden.
My research interests lie in Robot teleoperation, Dual-arm Manipulation, Human–robot Intelligent
Interface, Wireless Robot. My research goal is to develop a robust robotic
system that can reproduce the operators' operation intention.
News
• [2025/10] One paper is accepted by IEEE THMS.• [2025/09] One paper is accepted by IEEE IoTJ.
• [2025/08] We are organizing a haptic workshop in IROS 2025.
• [2025/08] Our book ‘Human motion awareness and robot teleoperation’ has been published in Springer.
• [2025/07] Selected for Priority-Funded Postdoctoral Research of China Postdoctoral Science Foundation.
• [2024/11] Get the general funding from China Postdoctoral Science Foundation.
• [2024/10] Selected for Priority-Funded Postdoctoral Research Project, Zhejiang Province.
• [2024/08] Get the funding from National Natural Science Foundation of China (NSFC).
• [2024/06] One paper is accepted by IEEE IEM.
• [2024/05] Selected for Postdoctoral Fellowship Program (Grade B) of China Postdoctoral Science Foundation.
• [2024/04] One paper is accepted by IEEE TASE.
• [2024/02] Continue my research as a Postdoc in Zhejiang University.
• [2023/12] I have passed the Ph.D. defense, finally Dr. Lyu is coming.
• [2023/11] My Ph.D. Dissertation has passed the double-blind review.
• [2023/07] Our paper has been selected as the Best Student Paper Finalist Award in ICIRA 2023.
• [2023/03] One Paper is accepted by ICIRA 2023.
• [2022/10] Our paper has been selected as the IEEE IES Young Professionals & Students Paper Assistance Award in IECON 2022.
• [2021/05] Our paper has been selected as the Outstanding Papers of of China Association for Science and Technology (CAST) in 2022, 第七届中国科协优秀科技论文.
Publication
Slected Works:
(* indicates the corresponding author)

Full Publication List:
Full Patent List:
See ... CV_23.11
Robot Systems
Teloperated Dual-arm YuMi Robot
If you want to know more about the human-robot motion mapping details, feel free to contact me. Here, we propose GuLiM, a new dexterous teleoperation system to transfer the upper-limb motion from the human to the robot. On the left, we show our hardware setup with the initial motion capture device with the YuMi robot.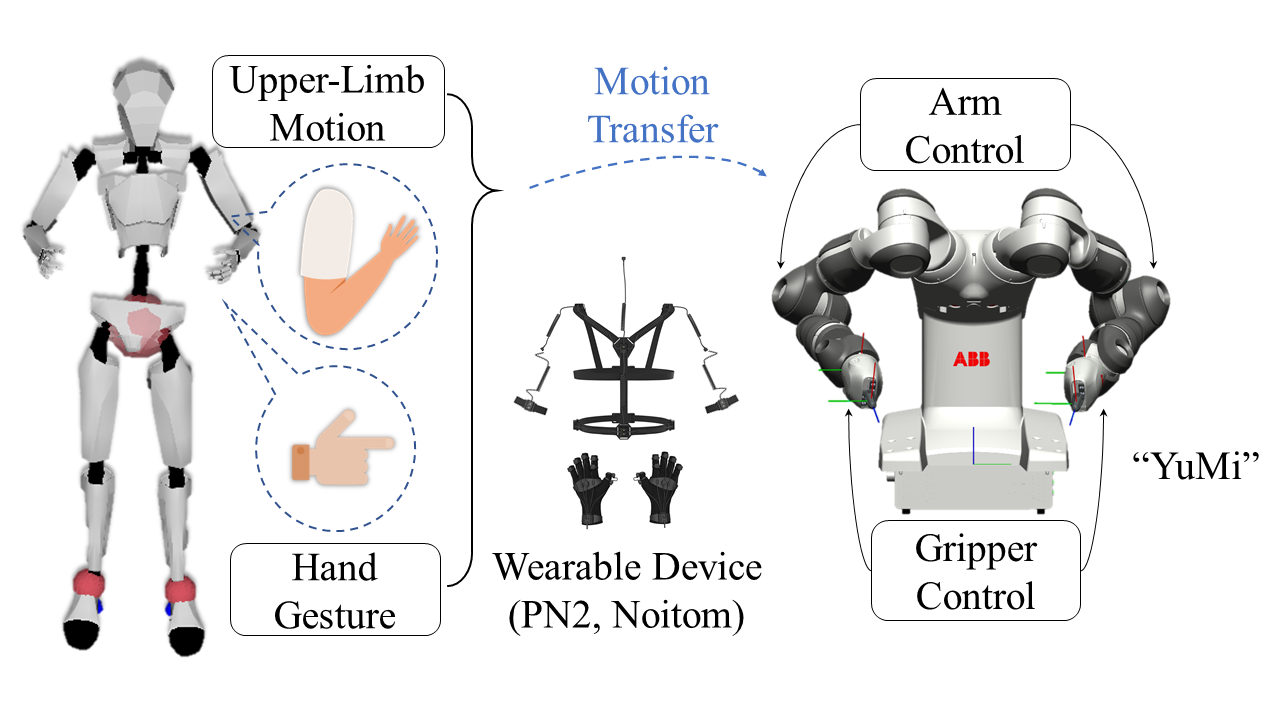
Hardware Setup
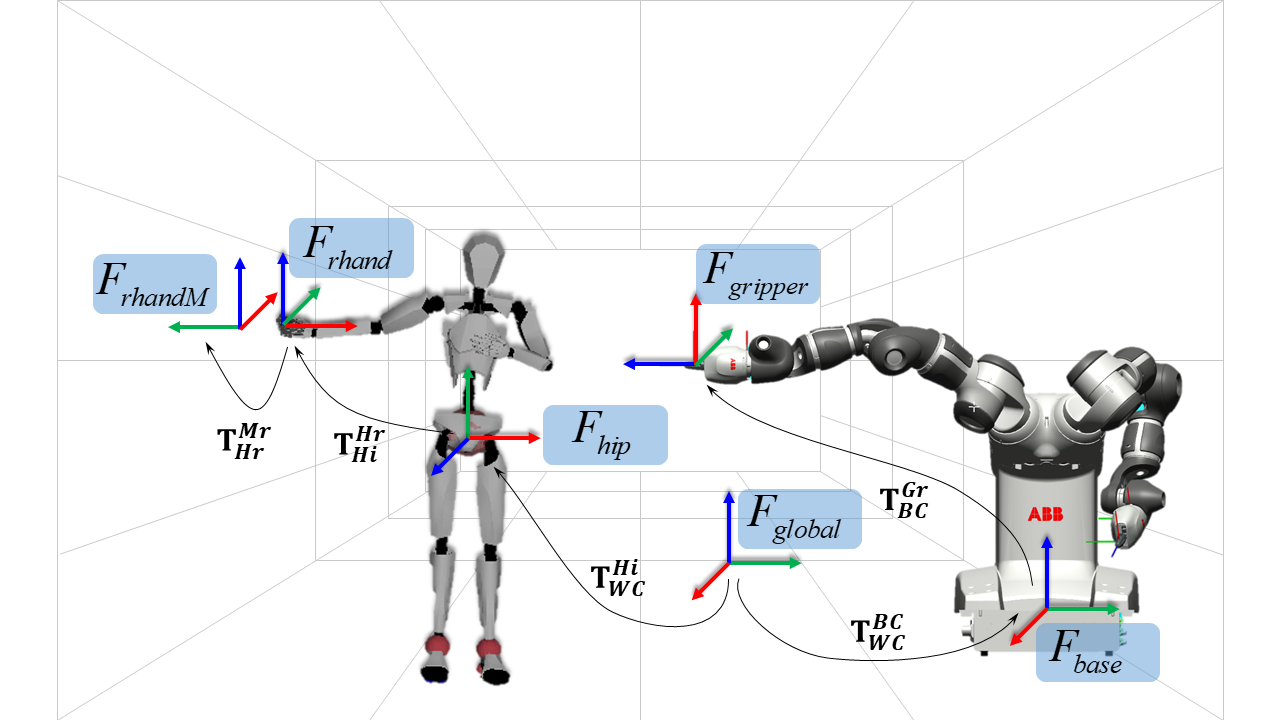
Motion Mapping Strategy
Experimental verification
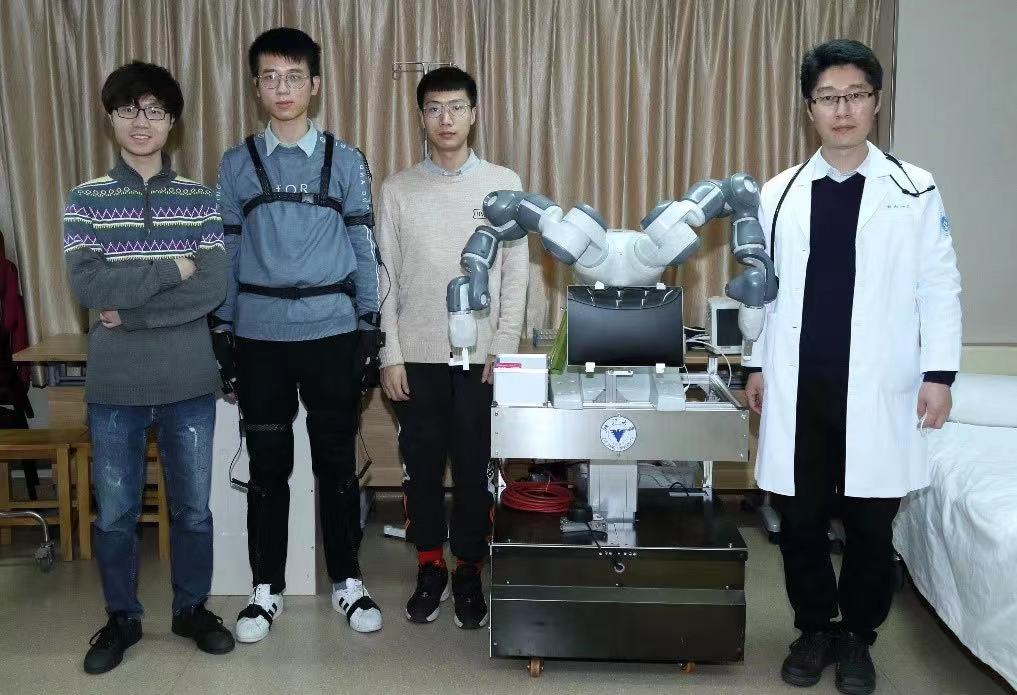
Teloperated Dual-arm Robot used in Isolation Ward
This telerobotic system combines the strengths of healthcare workers (expert knowledge for patient care) with the strengths of robotics (social distancing and capabilities to work in hazardous environments) to give the best outcome to patients and healthcare workers. Implementation of the robot in the battle against COVID-19 has obtained positive feedback from healthcare workers for its potential in blocking infection and effectiveness in relieving medical workers from repeated tasks.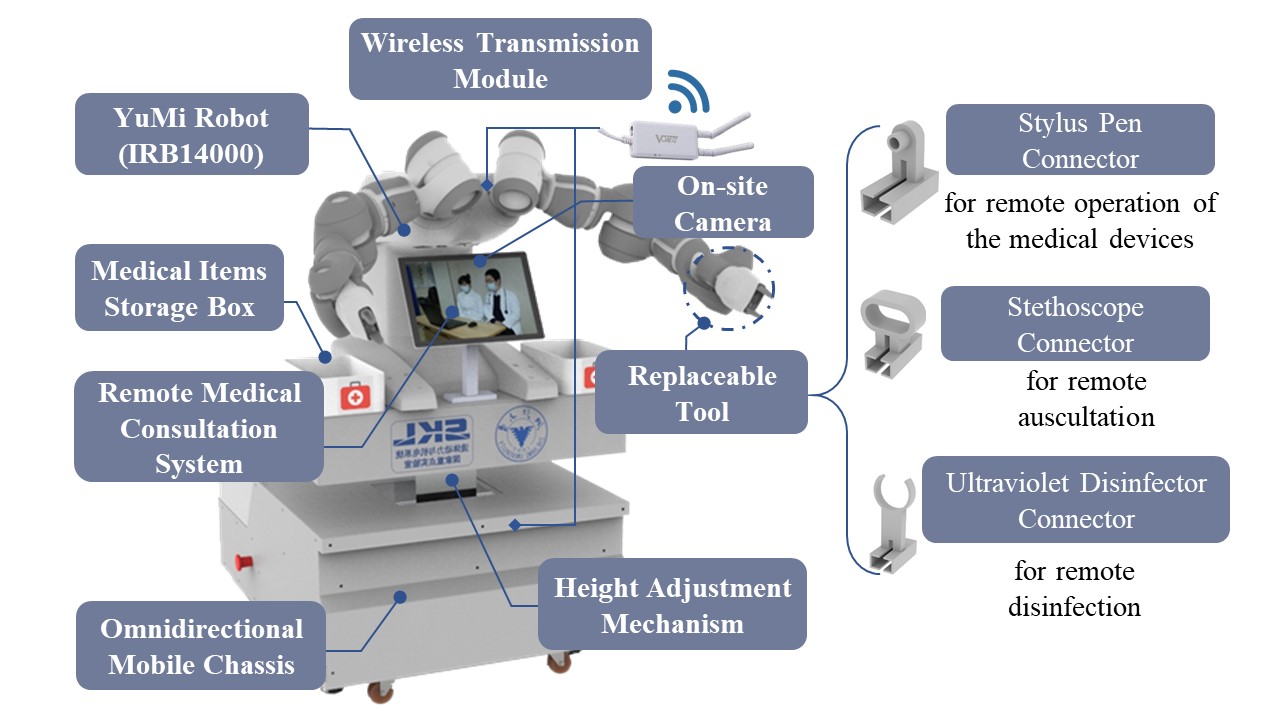
Hardware Setup

Functional Test
Verification in Isolation Ward
Teloperated Dual-arm Kinova Robot with Wheeled-Chassis
Here, an anthropomorphic dual-arm mobile robot named Herdsman for in-house grasping tasks is proposed.
Inspired by the human behavior
to grasp the object, an articulated torso is designed to perform human-like reaching motions.
Additionally, an anthropomorphic reaching
grasping movement generating method is proposed to achieve the task adaptability. The aim of this work is
to enhance the capabilities
and usefulness of service robots, increase the range of tasks that robots can perform, and improve their
overall utility and
effectiveness in home environments.
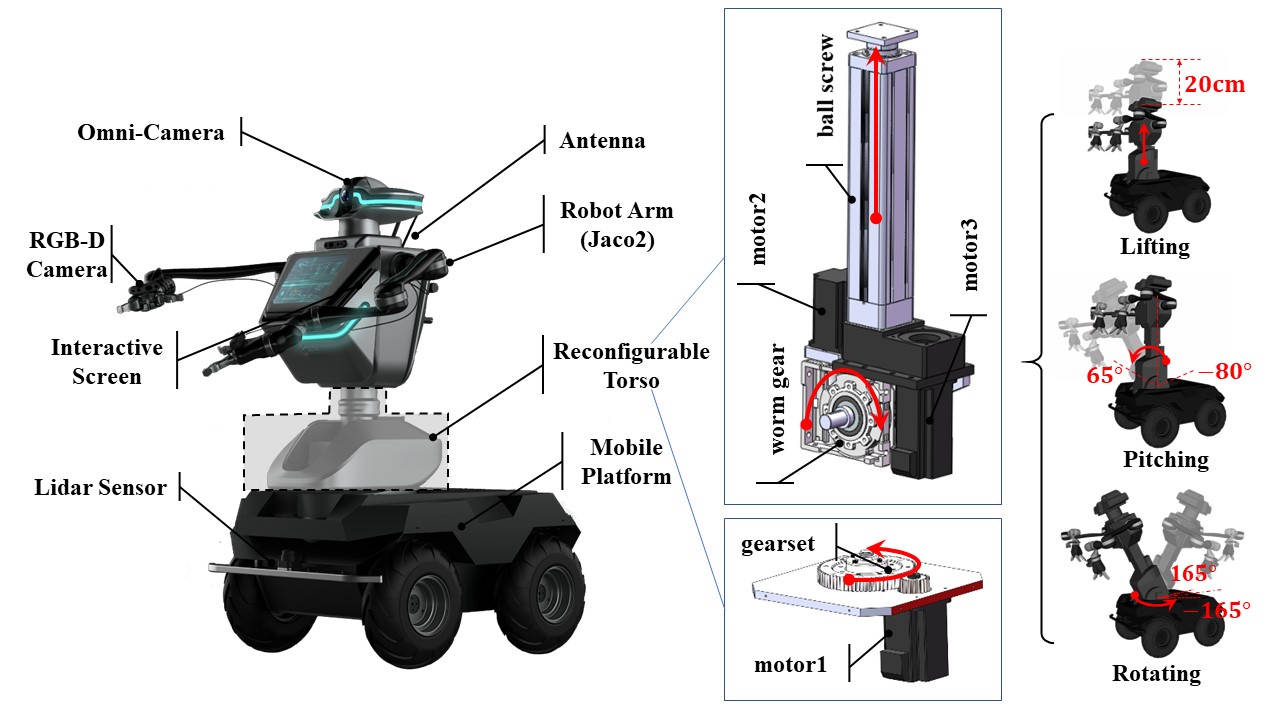
Hardware Setup
Movement Demostration
Teleoperation Verification
Homecare Robot that can Carry and Assist People
We integrated the design of a nursing-care assistant robot for aged-care at home that can not only carry people similar to a wheelchair, but also grasp the target object. The user can sit on the seat part in front of the nursing cooperative robot, and the dual manipulator makes corresponding nursing actions behind the user such as assisting in helping the user get up from the seat, fetching the target object, and so on.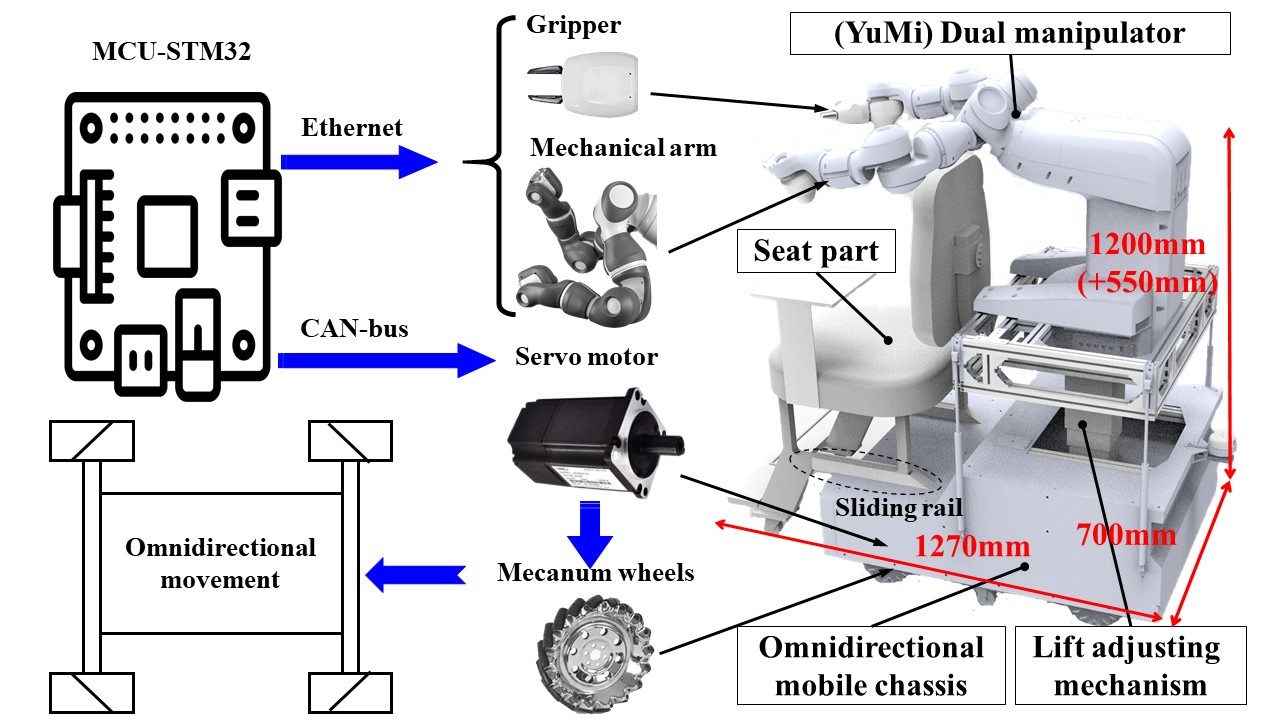
Hardware Setup
Movement Ability
Homecare Demonstration
Collaborative works for safe human-robot interaction
During my PhD, I collbrated with my collogaes to build various verification robot platforms to test their self-developed robot skin for safe HRI.Impedance Control
YuMi - Obstacle Avoidance
Kinova - Approaching Emergency Stop
Professional Service
• Conference Reviewer: ICRA, ICIRA• Journal Reviewer: IEEE TII, IEEE RAL, IEEE RAM, IEEE JBHI, Scientific Report
• IEEE Society Volunteer: I have been selected to represent the IEEE R10 region (Asia and Pacific) as an IEEE Industrial Electronics Society (IES) Ambassador for 2023.
More About Me
Footprints in Conferences
I am actively engaged in academic/industry conferences within the field of robotics, participating as an attendee, author, or event organizer. This allows me to keep track of the forefront developments in the current domain.

ICIRA 2023, Hangzhou, China
IECON 2022, Brussel, Belgium
PTC 2021, Shanghai, China
ICFP 2021, Hangzhou, China

CCRS 2019, Shenyang, China

INDIN 2019, Helsinki, Finland
China RobotOP 2019, Ningbo, China
Selected Memories with Robot
During my traineeship at the ABB CRC Sweden, I have cherished various memories with different ABB products and robots. Most importantly, the bond I formed with my mentor and friends remains invaluable.

ABB Open Day
Single Arm YuMi

Mobile YuMi
During my PhD studies at Zhejiang University, I've had both positive and negative experiences with robots. However, the meetings with my team members working on robots will always be cherished as wonderful moments.
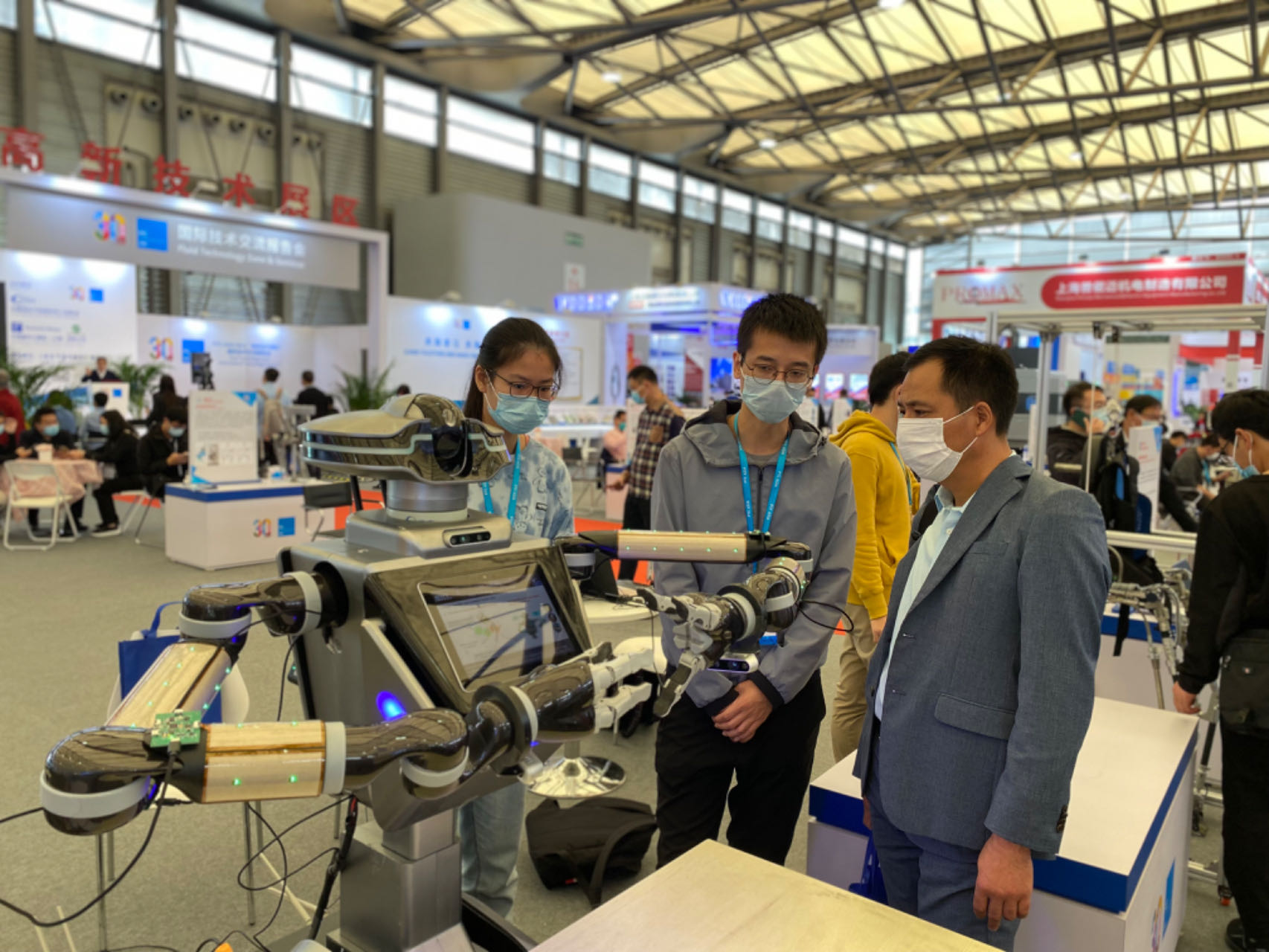
Dual-arm Kinova Robot in PTC 2021
Dual-arm Kinova Robot Repairing
Mobile YuMi used in Isolation Ward
Earlier Projects during Bachelor in CUMT, 2014-2018
Application of Face Recognition and Voice Control in Remote Smart Home System-(CUMT
2017.04-2018.03):
This project is my 2nd SRTP project in CUMT. In this work, a smart home system is designed,
in wihch the face recognition and vioce control tech. are applied. A patent of this work is granted and
the protypo of this
work won the 3rd prize in Virtual Instrument Contest of Jiangsu Province. Main contribution description:
(1) conducted a face recognition system based on the Face++ & LabVIEW, and implemented this tech into NI
myRIO for application;
(2) conducted a remote voice control system using Node.js and Raspberry Pi,
and realize the voice control using Siri based on Apple's HomeKit;
(3) conducted a tele-monitoring system using MJPG-streamer & LabVIEW,which can realize the realtime
monitoring of the home environment;(4) conducted a home environmental parameter acquisition system which
can realize
the monitoring of the temperature, humidity, strength of illumination and the air quality in home;
(5) remote home appliance control system:Through the http transmission protocol, the combination of
embedded hardware platform and labview realizes the remote real-time control of home appliances.
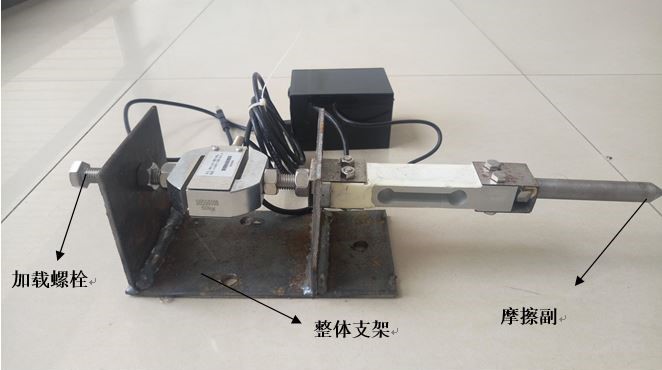
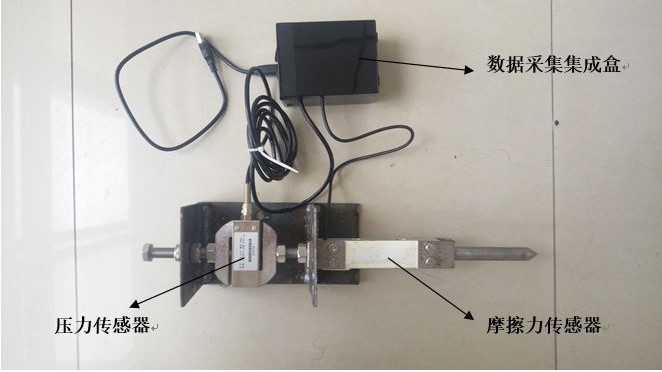
R&D of a portable friction coefficient tester-(CUMT 2016.04-2017.04): This project is my first SRTP
project in CUMT.
In this work, a prototype was built by the self-designed mechanical structure and
data processing program based on LabVIEW, which has been tested successfully.
I am in charge of designing the hardware circuit and programming the whole LabVIEW codes.
Compared with most of the current brake friction test bench, it has the outstanding advantages
and application significance, such as convenient installation, strong portability, greatly reduced cost,
small and portable volume, strong field application ability, easy data acquisition.
Update: 2023.11
Credit: web source from Mr. Binghao Huang