Tips: You can get a better experience of this site in Google chrome browser.
Overview
Welcome to our Project: GuLiM motion transfer
Citation:
This work has been published in IEEE Transactions on Medical Robotics and Bionics.
@ARTICLE{9693932,
author={Lv, Honghao and Kong, Depeng and Pang, Gaoyang and Wang, Baicun and Yu, Zhangwei and Pang, Zhibo and Yang, Geng},
journal={IEEE Transactions on Medical Robotics and Bionics},
title={GuLiM: A Hybrid Motion Mapping Technique for Teleoperation of Medical Assistive Robot in Combating the COVID-19 Pandemic},
year={2022},
volume={4},
number={1},
pages={106-117},
doi={10.1109/TMRB.2022.3146621}
}
Abstract:
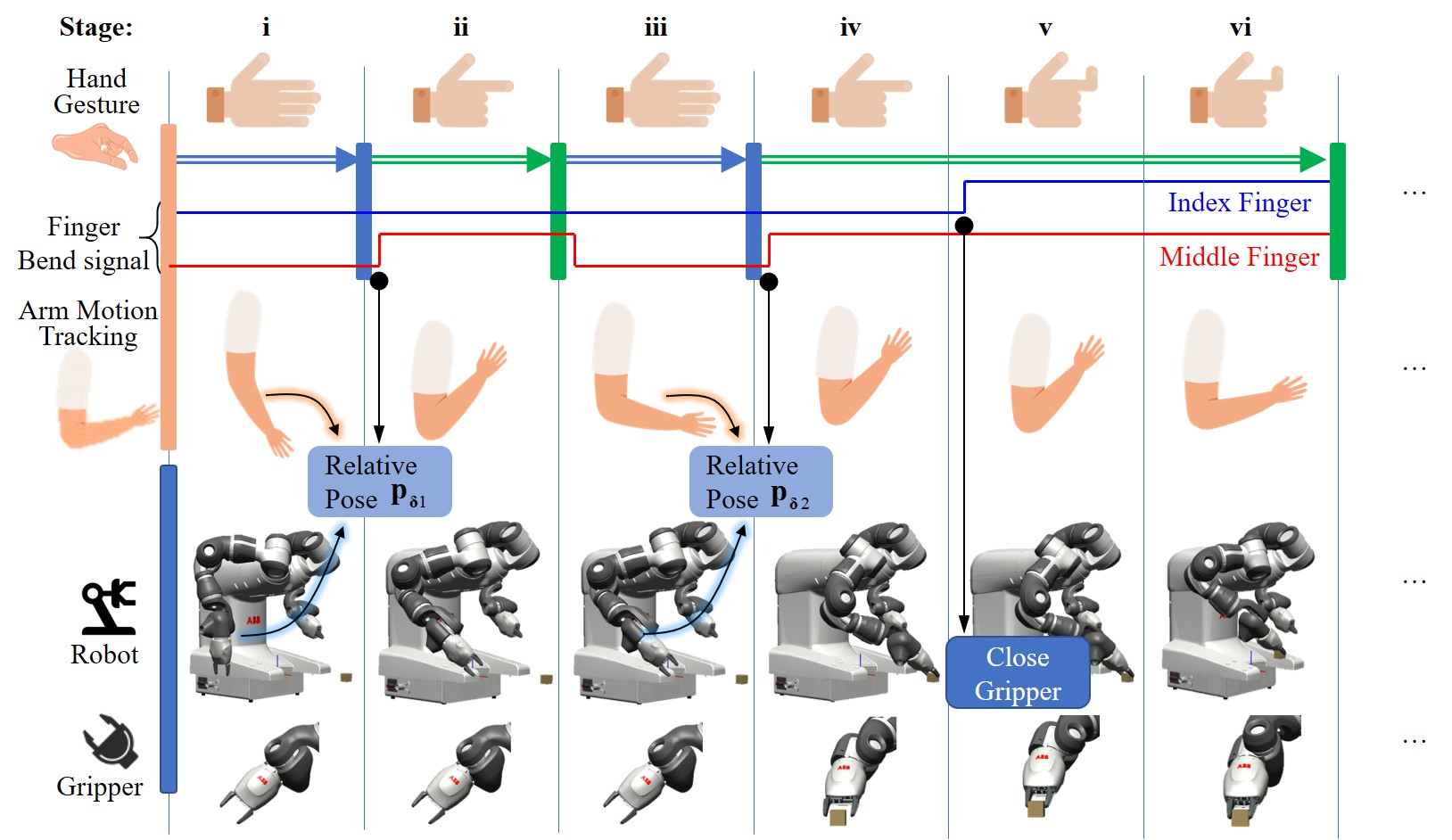
We present an intuitive teleoperation approach for human-robot motion transfer. Hybrid mapping of hand gesture and limb motion method (GuLiM) with incremental pose mapping strategy is introduced to flexibly map the workspace between human and robot. This GuLiM method cost-effectively enables a non-expert to transfer a rough manipulation skill to an assistive robot for challenging tasks.
Contact:
Honghao Lv (lvhonghao [at] zju.edu.cn)
Setup
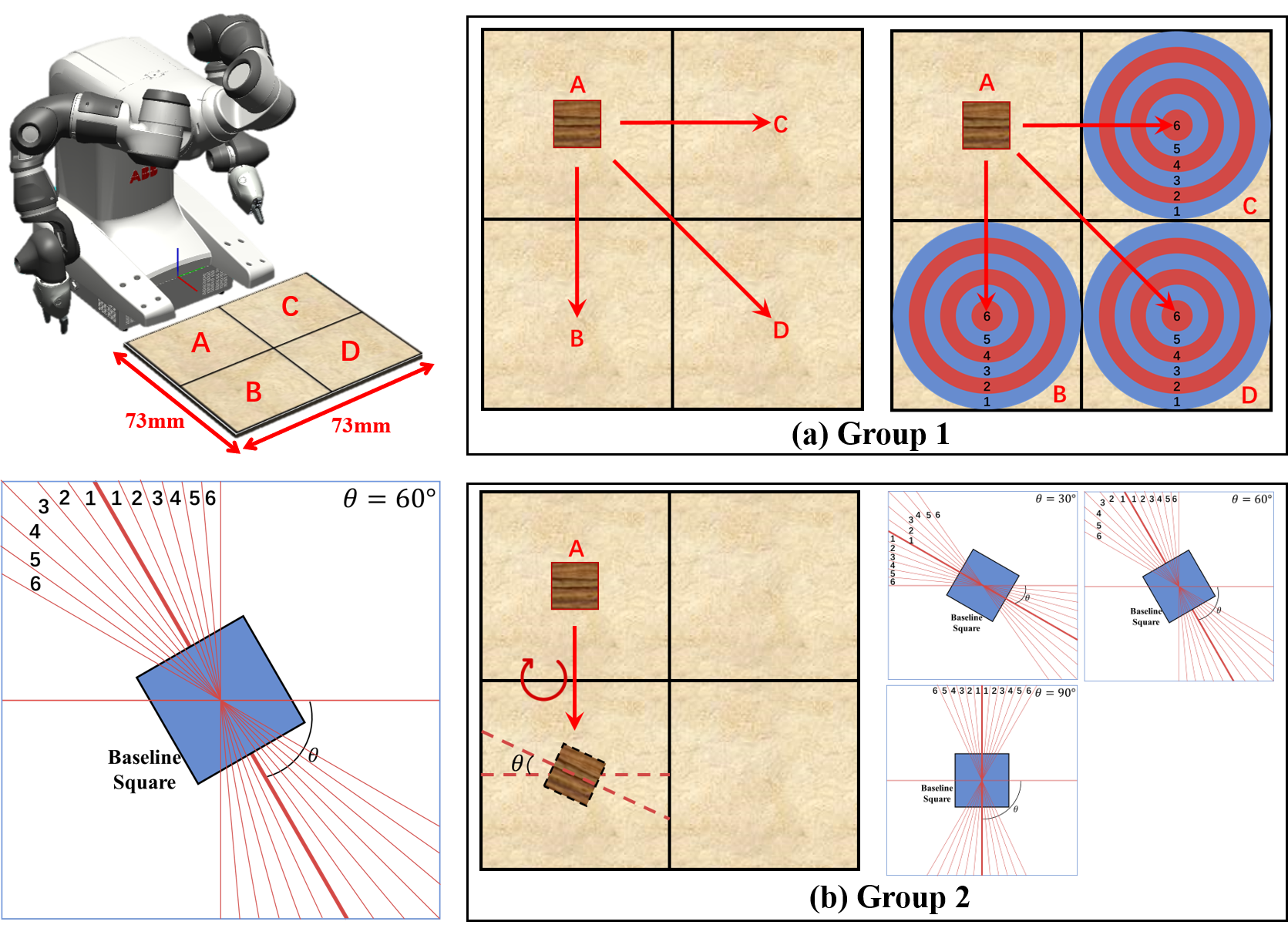
Task1:
Grab a block and place it in the specific region.
From region A to region B.
| DMM | GuLiM |
From region A to region C.
| DMM | GuLiM |
From region A to region D.
| DMM | GuLiM |
Task2:
Grab a block and place it at the specific angle.
Place at 30 degrees.
| DMM | GuLiM |
Place at 60 degrees.
| DMM | GuLiM |
Place at 90 degrees.
| DMM | GuLiM |